Rosetta mission: Can you land on a comet?
- Published
The European Space Agency made history by successfully landing a robot on a comet in deep space.
Can you put the Philae lander in the right spot on a spinning comet in this interactive game? In real life, the landing took about seven hours, so we've sped things up for you. For a more in-depth look at the comet, the lander and the mission, read on below the game.
This game won't work in browsers older than IE10. Best viewed in Safari, Chrome, Firefox, IE10+
The game is not currently available on the BBC News App. Follow this link to play the game.

After 10 years, and a journey of more than six billion kilometres, the Rosetta spacecraft sent its fridge-sized Philae lander down to Comet 67P/Churyumov-Gerasimenko.
Philae bounced when it hit the comet and came to rest in an area where it could not get enough sunlight to recharge its batteries. So, after about 60 hours of experiments, the little lander went to "sleep" in standby mode.
But after seven months' radio silence, during which the comet travelled closer to the Sun, Philae woke up and contacted Earth.
Philae has now been able to send back more data for analysis. Meanwhile, Rosetta maintains its orbit around the comet, sending back data of its own. Scientists had hoped the mission could help unlock answers about the formation of the Solar System, the origins of water on Earth and perhaps even life itself.
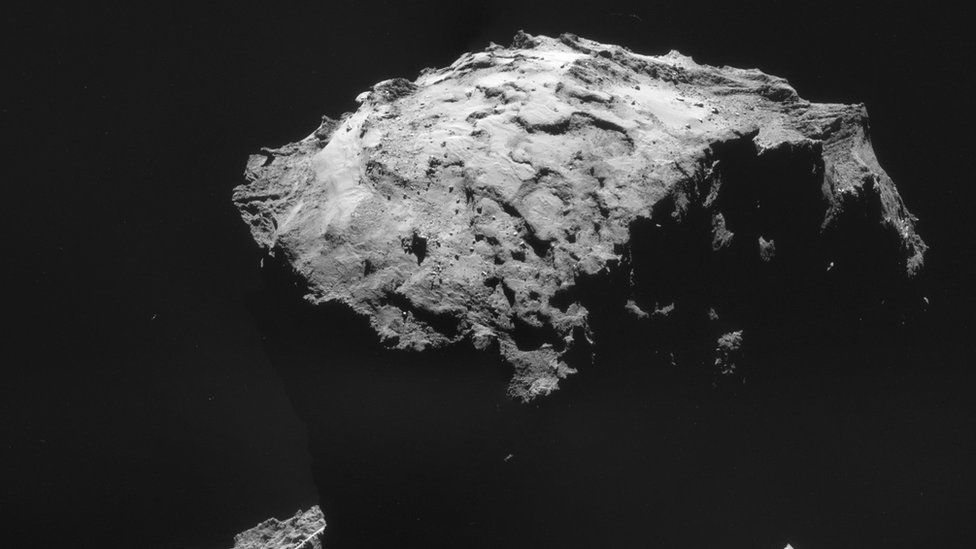
The comet

After more than 10 years travelling through space, we're now making the best ever scientific analysis of one of the oldest remnants of our Solar System," Alvaro Giménez, Esa's director of science and robotic exploration
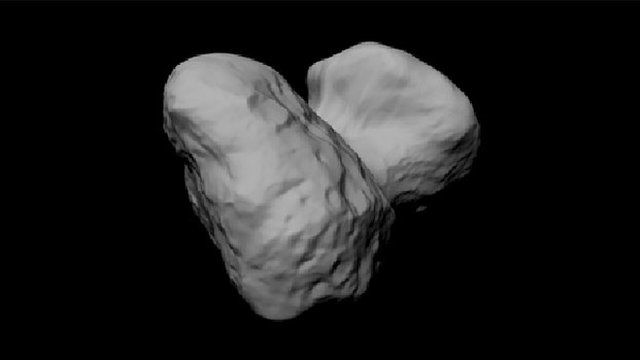
The challenge for the flight team operating Rosetta from back on Earth was to land Philae on a rotating, duck-shaped comet travelling through space at 18km per second (40,000mph).
The best possible landing site was decided in September, after Rosetta caught up with the comet and started to orbit around it. Scientists and engineers identified Site J (now known as "Agilkia") on the smaller "head" lobe as the best site for landing and subsequent experiments.
Agilkia had good lighting conditions, which for Philae would mean having some periods to recharge its solar-powered batteries and periods of darkness to cool its systems.
It is now thought Philae landed on target, in Agilkia, but then bounced into a less hospitable spot.


Separation and landing

"This machine performed magnificently under tough conditions, and we can be fully proud of the incredible scientific success Philae has delivered," Stephan Ulamec, Lander project manager
The launch of the lander nearly didn't happen at all. The Rosetta team had to make a series of Go or No-Go decisions before separation could take place - the third "go" signal was delayed due to concerns that the Philae thruster system, which would be used to push it into the surface on landing, was broken. But the green light was finally given early on 12 November 2014.
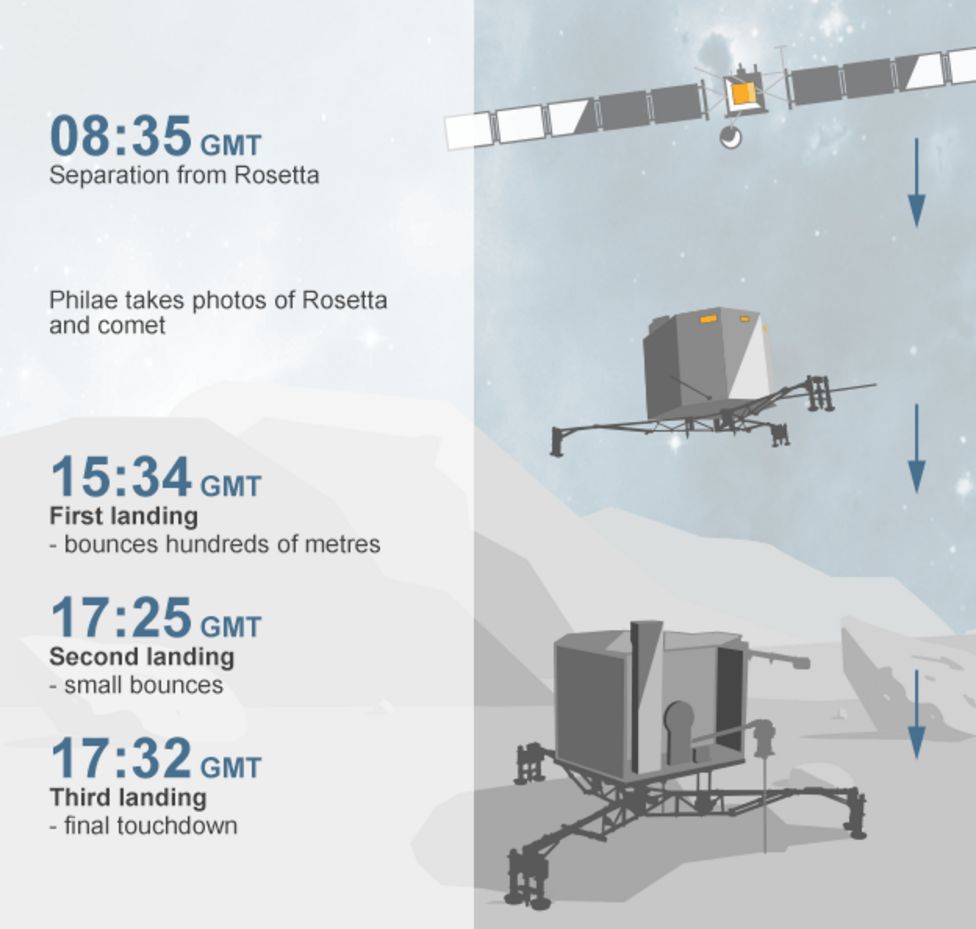
1: Release from Rosetta
Rosetta pushed the Philae lander away 08:35 GMT. Rosetta needed to release Philae at exactly the right place in time and space to be sure of putting the little robot on the correct path to the comet.
2: Descent
The descent to the comet's surface took about seven hours. On the way down, Philae sent back an image of Rosetta and started taking measurements of the environment around the comet.
3: Landing zone
The chosen landing area was not perfectly flat, but most slopes were at an angle of less than 30 degrees, giving good confidence it could touchdown in a favourable place. Because the comet was about 510 million km from Earth on the day, communication between Rosetta and controllers took 28 minutes and 20 seconds each way. As a consequence, confirmation of the landing came through just after 16:03 GMT.
4: Touchdowns
After the initial celebrations, data arrived to suggest not all was as it seemed. Philae appears to have landed on the comet, on target, before rebounding hundreds of metres upwards. After a couple of hours, it landed again on the comet, before bouncing a second time, for seven minutes, and then finally coming to rest. The rotation of the comet during its first bounce meant Philae is believed to have travelled about a kilometre from the initial touchdown.
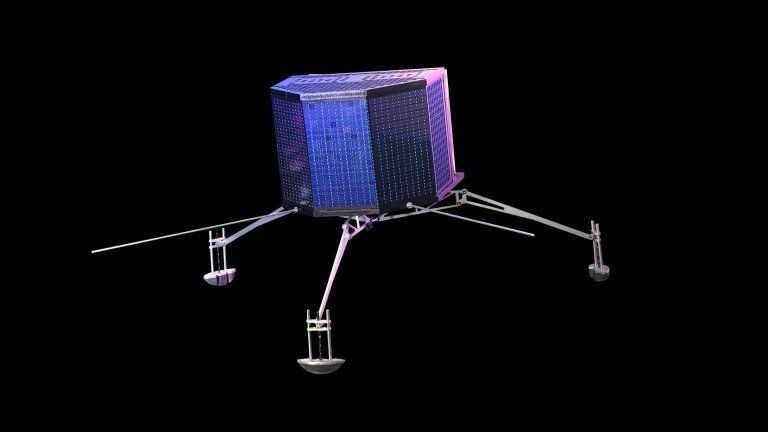
The Philae lander
While the landing did not go exactly to plan, the team said it was a success as the lander completed its primary science mission. Philae was able to perform a number of tasks - from taking photos to undertaking science experiments using its onboard instruments. It transmitted all the data it had to Rosetta before losing power.
Drills, ovens, cameras and sensors onboard Philae were designed to analyse everything from the surface composition and temperature to the presence of amino acids - essential building blocks in the chemistry of life.

1: Cameras - Philae's CIVA imaging system took a 360-degree panorama of Philae's final resting place. The downward-looking ROLIS system took photos of the comet on descent, and close-ups once it landed.
2: Nucleus probe - CONSERT - uses radio waves to probe the internal structure of the comet nucleus. Data from this instrument may help locate the lander.
3: Footscrews - Ice screws on the feet of Philae's legs were supposed to drill down into the comet to secure the lander, but with the robot's harpoons and downward thruster not working - the screws had little chance of getting any purchase.
4: Sample drill - SD2 - Sample and Distribution Device. Attempts were made to drill more than 20cm into the surface, collect samples and deliver them to a German-led onboard laboratory called COSAC. (Insufficient power meant the UK-led PTOLEMY lab missed out). Scientists continue to study the data to see what if anything was delivered to COSAC.
5: Harpoons - Immediately after touchdown, harpoons were supposed to fire to try to anchor Philae to the comet's surface and prevent it bumping off because of the comet's weak gravity. These failed.
6: Surface probe - MUPUS - Sensors on the lander's anchor, probe and exterior are designed to measure the density, thermal and other properties of the surface and subsurface. When MUPUS tried to hammer a sensor into the subsurface, the probe broke. This suggests the material just below 67P's dust covering is very hard.
Prof Ian Wright, of the Open University, is the principal investigator of the Ptolemy instrument. He says the Rosetta mission was already a success, even before the landing.
"As things stand, the orbiter will continue to shadow the comet until the end of next year. This will be an opportunity to observe how the body responds to its close passage to the Sun," he explained.
"The point though is not merely to watch the comet from a safe distance, but to get down on the ground and actually touch the object. For those of us who are used to handling and analysing samples in the lab, it is the only way to study it."
What next?

Scientists used data from Philae's instruments and photos from Rosetta to try to determine where exactly the robot landed. Images from the lander show it is close to a cliff, mostly in shadow.
With the lander in standby mode, contact would not be possible unless the solar panels received sufficient power to wake Philae up. That now appears to have happened as the comet has journeyed closer to the Sun. The chances of this happening were increased slightly in the last few hours of battery life when mission controllers sent commands to rotate the lander's main body to expose the solar panel with the greatest area to the available sunlight.
Meanwhile, the Rosetta orbiter has been circling around the comet. Rosetta will continue to study 67P using its 11 science instruments until at least December 2015.
Data collected by the orbiter will allow scientists to monitor how the comet changes.
"The data collected by Philae and Rosetta is set to make this mission a game-changer in cometary science," says Matt Taylor, Esa's Rosetta project scientist.

August 2014: Rendezvous with comet - Rosetta reaches Comet 67P/Churyumov-Gerasimenko after a 10-year journey. The craft starts orbiting the comet and identifies suitable sites for the Philae lander.
November 2014: First Science Sequence - After landing on the comet, Philae was able to complete a predetermined set of experiments.
December 2014: Long-term science - Further experiments from Philae will depend on whether it gets enough sunlight to recharge its batteries. Rosetta will move in for a closer, 20km orbit on 6 December and continue its mission to study the comet. Over the following months, it will also perform flybys as close as 8km from the comet's nucleus.
March 2015: Lander limits - Had Philae stuck to Agilkia, it would likely have stopped working in March because its electronics would have overheated. Sitting in its shady trap, Philae may actually now work for longer than anticipated.
August 2015: Perihelion - The comet reaches its closest position to the Sun. Rosetta will be measuring the level of activity as the icy materials in 67P vaporise, throwing out large volumes of gas and dust. The comet nucleus will wear a dense shroud, or coma. A tail of gas and dust will also trail away from 67P for thousands of km.
Game and page designed, developed and produced by Gerry Fletcher, James Offer, Marcelo Zanni and Dominic Bailey
- Published17 June 2015

- Published14 June 2015
- Published4 November 2014
- Published3 October 2014
- Published14 October 2014




